
Page 71 - 魅力机器——玩转趣味机械
P. 71
项目四 游泳高手
人类的游泳动作比较复杂,用简易的方式很难模仿,应抓住某些重点动作特征,如自由
泳的双脚交替打水动作,这是比较容易实现的仿生动作。人类自由泳时脚掌打水对于身体
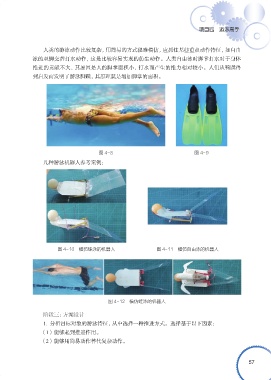
推进的贡献不大,其原因是人的脚掌面积小,打水而产生的推力相对较小。人们从鸭蹼得
到启发而发明了游泳脚蹼,其原理就是增加脚掌的面积。
图 4-8 图 4-9
几种游泳机器人参考案例:
图 4-10 模仿蝶泳的机器人 图 4-11 模仿自由泳的机器人
图 4-12 模仿蛙泳的机器人
阶段三:方案设计
1. 分析目标对象的游泳特征,从中选择一种推进方式。选择基于以下因素:
(1) 能够起到推进作用。
(2) 能够用简易动作替代复杂动作。
57