
Page 54 - 魅力机器——玩转趣味机械
P. 54
魅力机器——玩转趣味机械
2. 分析:
(1) 在驱动力不变的情况下,影响机器人爬杆速度的主要因素是 C 形扣是否打滑。
C 形扣与杆子的接触面积较小,且两者间的摩擦系数较小,机器人要克服重力向上爬,需要
较大的静摩擦力,因此爬行效率较低。
(2) 增大动力机芯的传动比,提高机器人运动频率,但转速增加的同时驱动力会下降,
因此要平衡两者间的关系。
(3) 爬杆机器人是克服自身所受重力向上爬,因此在不影响功能的情况下减轻重量是
最有效的措施。
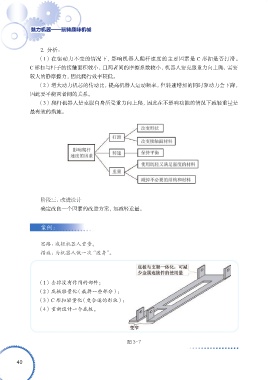
阶段三:改进设计
确定改良一个因素的改进方案,如减轻重量。
案例:
思路:减轻机器人重量。
措施:为机器人做一次“瘦身”。
(1) 去掉没有作用的部件;
(2) 底板轻量化(裁掉一些部分);
(3) C 形扣轻量化(更合适的形状);
(4) 重新设计一个底板。
图 3-7
40