
Page 115 - 智慧芯控——Arduino+智造
P. 115
智慧芯控——Arduino+ 智造
阶段二:编写控制程序
1. 了解原理。
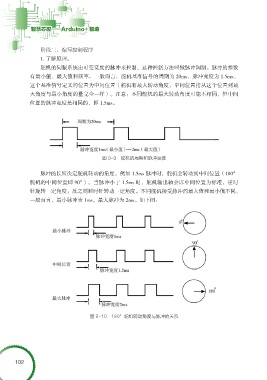
舵机的伺服系统由可变宽度的脉冲来控制,这种控制方法叫做脉冲调制。脉冲的参数
有最小值、最大值和频率。一般而言,舵机基准信号的周期为 20ms,脉冲宽度为 1.5ms。
这个基准信号定义的位置为中间位置(舵机有最大转动角度,中间位置指从这个位置到最
大角度与最小角度的量完全一样)。注意:不同舵机的最大转动角度可能不相同,但中间
位置的脉冲宽度是相同的,即 1.5ms。
图 9-9 舵机的周期和脉冲宽度
脉冲的长短决定舵机转动的角度,例如 1.5ms 脉冲时,舵机会转动到中间位置(180°
舵机的中间位置即 90°)。当脉冲小于 1.5ms 时,舵机输出轴会以中间位置为标准,逆时
针旋转一定角度;反之则顺时针转动一定角度。不同舵机接受脉冲的最大值和最小值不同,
一般而言,最小脉冲为 1ms,最大脉冲为 2ms。如下图:
图 9-10 180°舵机转动角度与脉冲的关系
102