
Page 84 - 智慧芯控——Arduino+智造
P. 84
2. 连接 Arduino 开发板和红外避障传感器。
红外避障传感器有 3 根连接线,分别是电源正极、电源负极和信号线。在连接时,
用杜邦线把电源正负极分别连接到控制器的“5V”和“GND”。马达驱动板已经占用了
Arduino 开发板的 8 个引脚,因此可将左、右红外避障传感器的信号线分别连接于 Arduino
开发板的 0、1 两个引脚上。
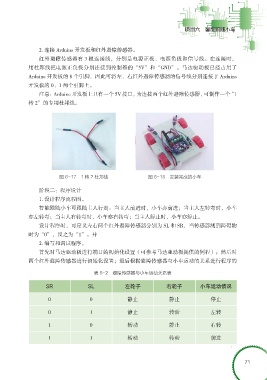
注意:Arduino 开发板上只有一个 5V 接口,为连接两个红外避障传感器,可制作一个“1
转 2”的专用杜邦线。
图 6-17 1 转 2 杜邦线 图 6-18 安装完成的小车
阶段二:程序设计
1. 设计程序流程图。
智能跟随小车可跟随主人行走:当主人前进时,小车亦前进;当主人左转弯时,小车
亦左转弯;当主人右转弯时,小车亦右转弯;当主人停止时,小车亦停止。
设计程序时,可定义左右两个红外避障传感器分别为 SL 和 SR,当传感器测到障碍物
时为“0”,反之为“1”。并
2. 编写和调试程序。
首先对马达驱动板进行端口的初始化设置(可参考马达驱动板提供的例程);然后对
两个红外避障传感器进行初始化设置;最后根据避障传感器与小车运动的关系进行程序的
表 6-2 避障传感器与小车运动关系表
SR SL 左轮子 右轮子 小车运动情况
0 0 静止 静止 停止
0 1 静止 转动 左转
1 0 转动 静止 右转
1 1 转动 转动 前进
71