
Page 93 - 智慧芯控——Arduino+智造
P. 93
智慧芯控——Arduino+ 智造
图 7-12 示波器显示霍尔传感器
图 7-11 串口监视器显示的结果 输出波形的变化
算转一圈的波形数量。
*3. 探究陀螺仪模块。
自平衡小车搭载了陀螺仪 MPU6050。在 kp 和 kd 不同值的情况下,测试自平衡小车的
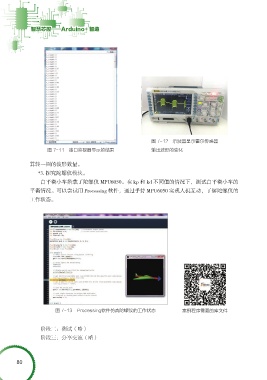
平衡情况。可以尝试用 Processing 软件,通过手持 MPU6050 实现人机互动,了解陀螺仪的
工作状态。
图 7-13 Processing软件仿真陀螺仪的工作状态 案例程序需要的库文件
阶段二:测试(略)
阶段三:分享交流(略)
80