
Page 28 - 人工智能——为机器植入智慧
P. 28
人工智能——为机器植入智慧
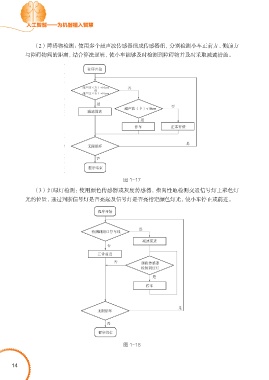
(2) 障碍物检测:使用多个超声波传感器组成传感器组,分别检测小车正前方、侧前方
与障碍物间的距离,结合算法逻辑,使小车能够及时检测到障碍物并及时采取减速措施。
图 1-17
(3) 红绿灯检测:使用颜色传感器或灰度传感器,指向性地检测交通信号灯上彩色灯
光的位置,通过判断信号灯是否亮起及信号灯是否亮指定颜色灯光,使小车停止或前进。
图 1-18
14