
Page 29 - 魅力机器——玩转趣味机械
P. 29
项目一 步行者
两侧的脚由电动机分别驱动,并用双向开关控制,便可实现机器人前进、倒退和转向等
动作。
我的设计方案
步行机器人名称 征服者(双电机六足机器人)
增加电机和遥控功能,四只脚变成六只脚,增强了行走时的稳
功能和特点
定性和可操作性,底部粘贴橡胶材料。
需要的材料 创意模型套材 2 份、线控器 1 个
特制零件 六只脚
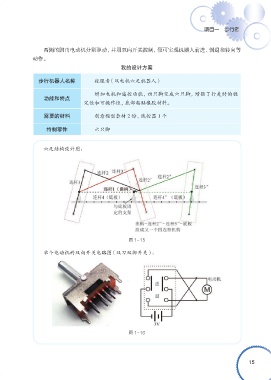
六足结构设计图:
图 1-15
单个电动机的双向开关电路图(双刀双掷开关):
图 1-16
15