
Page 46 - 魅力机器——玩转趣味机械
P. 46
魅力机器——玩转趣味机械
如图 2-16 所示,人在缆绳上方的爬行方式是利用手臂的拉动和腿的后蹬推动身体前
进,腿后蹬的同时可以使身体保持在缆绳上方,而另一条腿下垂可降低整体重心,便于控制
体态和手脚的协调动作。
爬单缆绳机器人 1 爬单缆绳机器人 2 爬双缆绳机器人
3. 趣味活动举例。
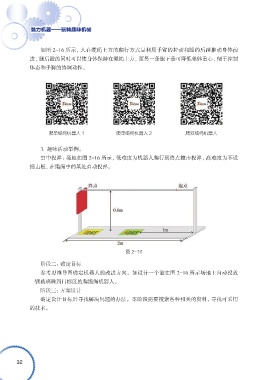
空中投弹:场地如图 2-16 所示,低难度为机器人爬行到终点撞击投弹,高难度为不设
撞击板,在缆绳中的某处自动投弹。
图 2-16
阶段二:确定目标
参考思维导图确定机器人的改进方向。如设计一个能在图 2-16 所示场地上自动投放
一颗玻璃珠到目标区的爬缆绳机器人。
阶段三:方案设计
确定设计目标后寻找解决问题的办法。本阶段需要搜索各种相关的资料,寻找可采用
的技术。
32